




ລະບົບການວັດແທກທັດສະນະຄະຕິ




ຄຸນສົມບັດຜະລິດຕະພັນ
MS-100A0 ແມ່ນທັດສະນະຄະຕິສາມລະດັບຂອງອິດສະລະໂດຍອີງໃສ່ເຕັກໂນໂລຢີກົນຈັກຈຸນລະພາກ (MEMS)
ລະບົບການວັດແທກ, ການກໍ່ສ້າງໃນ MEMS gyroscope ປະສິດທິພາບສູງແລະ MEMS accelerometer, ຜ່ານ algorithm ການກັ່ນຕອງຄິດໄລ່ມຸມ pitch, ມຸມມ້ວນແລະມຸມຫົວຂອງຜູ້ໃຫ້ບໍລິການໃນເວລາທີ່ແທ້ຈິງ.ຍັງໄດ້ຈັບຄູ່ທາງເລືອກກັບເຄື່ອງວັດແທກແມ່ເຫຼັກເພື່ອບັນລຸການຊອກຫາທາງທິດເໜືອທີ່ມີຄວາມຊັດເຈນສູງ, ແລະຜົນຜະລິດ 3-axis velocity ແລະການເລັ່ງ 3-axis ແມ່ນໃຊ້ສໍາລັບການຄວບຄຸມການເຄື່ອນໄຫວ.
ຄຸນລັກສະນະຜະລິດຕະພັນ
- ດີກວ່າຄວາມຖືກຕ້ອງຂອງທັດສະນະຄະຕິ 0.1°
- ລະດັບການວັດແທກທັດສະນະຄະຕິ ±90°
- ລະດັບອຸນຫະພູມປະຕິບັດການ: -40 ~ 65 ℃
- ສະພາບແວດລ້ອມການສັ່ນສະເທືອນ: 10 ~ 2000Hz, 6g (RMS)
- ປະເພດການໂຕ້ຕອບທີ່ອຸດົມສົມບູນ, ສະຫນັບສະຫນູນ RS232, RS422, CAN ແລະການໂຕ້ຕອບມາດຕະຖານອື່ນໆ
- ການອອກແບບປະທັບຕາກັນນ້ໍາ
ຄຸນລັກສະນະທາງໄຟຟ້າ
- ການສະຫນອງພະລັງງານ: 5V (typ.), ປັບແຕ່ງແຮງດັນໄຟຟ້າກວ້າງ 12 ~ 36V
- ກຳລັງໄຟ: 0.5W (ສູງສຸດ)
- ກະແສໄຟຟ້າ: 100mV (ສູງສຸດເຖິງຈຸດສູງສຸດ)
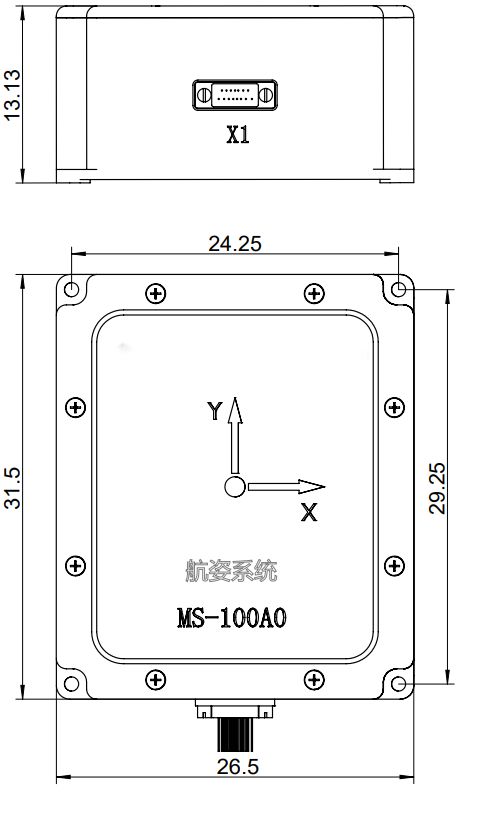
ຂະຫນາດກົນຈັກ
ຕົວຊີ້ວັດດ້ານວິຊາການ
| ຕົວກໍານົດການ Gyro | ||||
| ພາລາມິເຕີ |
ເງື່ອນໄຂການທົດສອບ | ຄ່າປົກກະຕິ |
ຄ່າສູງສຸດ | ໜ່ວຍ |
| ໄລຍະການວັດແທກແບບໄດນາມິກ |
|
| 450 | º/s |
| ສູນຄວາມໝັ້ນຄົງອະຄະຕິ | Allan variance, ແກນ Z | 0.8 |
| º/ຊມ |
| Allan variance, X-axis ແລະ Y-axis | 1.6 |
| º/ຊມ | |
| 10s ໂດຍສະເລ່ຍ, X, Y axis (-40℃ ~ + 80℃, ອຸນຫະພູມຄົງທີ່) | 6 |
| º/ຊມ | |
| 1s ສະເລ່ຍ, X, Y axis (-40℃~+80℃, ອຸນຫະພູມຄົງທີ່) | 9 |
| º/ຊມ | |
| ສູນຊົດເຊີຍ | ໄລຍະຊົດເຊີຍສູນ | ±0.2 |
| º/s |
| ການປ່ຽນແປງສູນອະຄະຕິໃນໄລຍະອຸນຫະພູມເຕັມ | ±0.06 |
| º/s | |
| ສາມາດເຮັດຊ້ຳໄດ້ຕັ້ງແຕ່ເລີ່ມຕົ້ນຫາເລີ່ມຕົ້ນ | 0.006 |
| º/s | |
| ການເລີ່ມຕົ້ນການເຮັດເລື້ມຄືນແຕ່ລະມື້ | 0.009 |
| º/s | |
| ອິດທິພົນຂອງການເລັ່ງ Linear ໃນ Zero Bias | 0.002 |
| º/s | |
| ອິດທິພົນຂອງການສັ່ນສະເທືອນໃນສູນການຊົດເຊີຍ, ການປ່ຽນແປງກ່ອນແລະຫຼັງຈາກການສັ່ນສະເທືອນ | 0.002 |
| º/s | |
| ອິດທິພົນຂອງການສັ່ນສະເທືອນໃນສູນການຊົດເຊີຍ, ການປ່ຽນແປງກ່ອນການສັ່ນສະເທືອນ | 0.002 |
| º/s | |
| ປັດໄຈຂະຫນາດ | ຄວາມຖືກຕ້ອງຂອງປັດໄຈຂະຫນາດ, ແກນ Z | 0.3 |
| % |
| ຄວາມຖືກຕ້ອງຂອງປັດໄຈຂະຫນາດ, ແກນ X, Y | 0.6 |
| % | |
| ປັດໄຈຂະໜາດບໍ່ເປັນເສັ້ນຊື່, ແກນ Z | 0.01 |
| %FS | |
| ປັດໄຈຂະໜາດບໍ່ເປັນເສັ້ນຊື່, ແກນ X, Y | 0.02 |
| %FS | |
| ຍ່າງແບບສຸ່ມມຸມ |
| 0.001 |
| °/√ຊມ |
|
ຄວາມຫນາແຫນ້ນຂອງສິ່ງລົບກວນ |
| 0.001 |
| °/s/√hr |
| ຄວາມລະອຽດ |
| 3.052×10−7 |
| º/s/LSB |
| ແບນວິດ |
| 200 |
| Hz |
| ຕົວກໍານົດການເລັ່ງຄວາມໄວ | ||||
| ພາລາມິເຕີ |
ເງື່ອນໄຂການທົດສອບ |
ຄ່າປົກກະຕິ | ຄ່າສູງສຸດ | ໜ່ວຍ |
| ໄລຍະການວັດແທກແບບໄດນາມິກ |
| 16 |
| g |
| ສູນຄວາມໝັ້ນຄົງອະຄະຕິ | ຄວາມແຕກຕ່າງຂອງ Allan | 0.03 |
| mg |
| 10s ສະເລ່ຍ (-40 ℃ ~ + 80 ℃, ອຸນຫະພູມຄົງທີ່) | 0.2 |
| mg | |
| 1s ສະເລ່ຍ (-40 ℃ ~ + 80 ℃, ອຸນຫະພູມຄົງທີ່) | 0..3 |
| mg | |
| ສູນຊົດເຊີຍ | ໄລຍະຊົດເຊີຍສູນ | 5 |
| mg |
|
ການປ່ຽນແປງຄ່າຊົດເຊີຍສູນ (ສູງສຸດຫາສູງສຸດ) ໃນໄລຍະອຸນຫະພູມເຕັມ | 5 |
| mg | |
| ສາມາດເຮັດຊ້ຳໄດ້ຕັ້ງແຕ່ເລີ່ມຕົ້ນຫາເລີ່ມຕົ້ນ | 0.5 |
| mg | |
| ການເລີ່ມຕົ້ນການເຮັດເລື້ມຄືນແຕ່ລະມື້ | 0.8 |
| mg | |
| ຄ່າສໍາປະສິດອຸນຫະພູມສູນ Bias | 0.05 | 0.1 | mg/℃ | |
| ປັດໄຈຂະຫນາດ | ຄວາມຖືກຕ້ອງຂອງປັດໄຈຂະຫນາດ | 0.5 |
| % |
| ປັດໄຈຂະໜາດບໍ່ເປັນເສັ້ນຊື່ | 0.1 |
| %FS | |
| ຍ່າງແບບສຸ່ມຄວາມໄວ |
| 0.029 |
| m/s/√hr |
| ຄວາມຫນາແຫນ້ນຂອງສິ່ງລົບກວນ |
| 0.025 |
| mg/√Hz |
| ຄວາມລະອຽດ |
| 1.221×10−8 |
| g/LSB |
| ແບນວິດ |
| 200 |
| Hz |
| ຕົວກໍານົດການແມ່ເຫຼັກ (ທາງເລືອກ) | ||||
| ພາລາມິເຕີ | ເງື່ອນໄຂການທົດສອບ |
ຄ່າປົກກະຕິ | ຄ່າສູງສຸດ |
ໜ່ວຍ |
| ໄລຍະການວັດແທກແບບໄດນາມິກ |
| 2.5 |
| ໂກສ |
| ສູນຊົດເຊີຍ | ສະພາບແວດລ້ອມທີ່ບໍ່ແມ່ນແມ່ເຫຼັກ | 15 |
| ມໂກສ |
| ຄວາມຖືກຕ້ອງຂອງຫົວຂໍ້ | ||||
| ຄວາມຖືກຕ້ອງຂອງຫົວຂໍ້ແມ່ເຫຼັກ |
| 0.5 |
| ° |
| ຄວາມຖືກຕ້ອງຂອງທັດສະນະຄະຕິແນວນອນ | ||||
|
ຄວາມຖືກຕ້ອງຂອງມຸມສຽງ |
| 0.1 |
| ° |
| ຄວາມຖືກຕ້ອງຂອງມຸມມ້ວນ |
| 0.1 |
| ° |
| ຕົວກໍານົດການ Gyro | ||||
| ພາລາມິເຕີ |
ເງື່ອນໄຂການທົດສອບ | ຄ່າປົກກະຕິ |
ຄ່າສູງສຸດ | ໜ່ວຍ |
| ໄລຍະການວັດແທກແບບໄດນາມິກ |
|
| 450 | º/s |
| ສູນຄວາມໝັ້ນຄົງອະຄະຕິ | Allan variance, ແກນ Z | 0.8 |
| º/ຊມ |
| Allan variance, X-axis ແລະ Y-axis | 1.6 |
| º/ຊມ | |
| 10s ໂດຍສະເລ່ຍ, X, Y axis (-40℃ ~ + 80℃, ອຸນຫະພູມຄົງທີ່) | 6 |
| º/ຊມ | |
| 1s ສະເລ່ຍ, X, Y axis (-40℃~+80℃, ອຸນຫະພູມຄົງທີ່) | 9 |
| º/ຊມ | |
| ສູນຊົດເຊີຍ | ໄລຍະຊົດເຊີຍສູນ | ±0.2 |
| º/s |
| ການປ່ຽນແປງສູນອະຄະຕິໃນໄລຍະອຸນຫະພູມເຕັມ | ±0.06 |
| º/s | |
| ສາມາດເຮັດຊ້ຳໄດ້ຕັ້ງແຕ່ເລີ່ມຕົ້ນຫາເລີ່ມຕົ້ນ | 0.006 |
| º/s | |
| ການເລີ່ມຕົ້ນການເຮັດເລື້ມຄືນແຕ່ລະມື້ | 0.009 |
| º/s | |
| ອິດທິພົນຂອງການເລັ່ງ Linear ໃນ Zero Bias | 0.002 |
| º/s | |
| ອິດທິພົນຂອງການສັ່ນສະເທືອນໃນສູນການຊົດເຊີຍ, ການປ່ຽນແປງກ່ອນແລະຫຼັງຈາກການສັ່ນສະເທືອນ | 0.002 |
| º/s | |
| ອິດທິພົນຂອງການສັ່ນສະເທືອນໃນສູນການຊົດເຊີຍ, ການປ່ຽນແປງກ່ອນການສັ່ນສະເທືອນ | 0.002 |
| º/s | |
| ປັດໄຈຂະຫນາດ | ຄວາມຖືກຕ້ອງຂອງປັດໄຈຂະຫນາດ, ແກນ Z | 0.3 |
| % |
| ຄວາມຖືກຕ້ອງຂອງປັດໄຈຂະຫນາດ, ແກນ X, Y | 0.6 |
| % | |
| ປັດໄຈຂະໜາດບໍ່ເປັນເສັ້ນຊື່, ແກນ Z | 0.01 |
| %FS | |
| ປັດໄຈຂະໜາດບໍ່ເປັນເສັ້ນຊື່, ແກນ X, Y | 0.02 |
| %FS | |
| ຍ່າງແບບສຸ່ມມຸມ |
| 0.001 |
| °/√ຊມ |
|
ຄວາມຫນາແຫນ້ນຂອງສິ່ງລົບກວນ |
| 0.001 |
| °/s/√hr |
| ຄວາມລະອຽດ |
| 3.052×10−7 |
| º/s/LSB |
| ແບນວິດ |
| 200 |
| Hz |
| ຕົວກໍານົດການເລັ່ງຄວາມໄວ | ||||
| ພາລາມິເຕີ |
ເງື່ອນໄຂການທົດສອບ |
ຄ່າປົກກະຕິ | ຄ່າສູງສຸດ | ໜ່ວຍ |
| ໄລຍະການວັດແທກແບບໄດນາມິກ |
| 16 |
| g |
| ສູນຄວາມໝັ້ນຄົງອະຄະຕິ | ຄວາມແຕກຕ່າງຂອງ Allan | 0.03 |
| mg |
| 10s ສະເລ່ຍ (-40 ℃ ~ + 80 ℃, ອຸນຫະພູມຄົງທີ່) | 0.2 |
| mg | |
| 1s ສະເລ່ຍ (-40 ℃ ~ + 80 ℃, ອຸນຫະພູມຄົງທີ່) | 0..3 |
| mg | |
| ສູນຊົດເຊີຍ | ໄລຍະຊົດເຊີຍສູນ | 5 |
| mg |
|
ການປ່ຽນແປງຄ່າຊົດເຊີຍສູນ (ສູງສຸດຫາສູງສຸດ) ໃນໄລຍະອຸນຫະພູມເຕັມ | 5 |
| mg | |
| ສາມາດເຮັດຊ້ຳໄດ້ຕັ້ງແຕ່ເລີ່ມຕົ້ນຫາເລີ່ມຕົ້ນ | 0.5 |
| mg | |
| ການເລີ່ມຕົ້ນການເຮັດເລື້ມຄືນແຕ່ລະມື້ | 0.8 |
| mg | |
| ຄ່າສໍາປະສິດອຸນຫະພູມສູນ Bias | 0.05 | 0.1 | mg/℃ | |
| ປັດໄຈຂະຫນາດ | ຄວາມຖືກຕ້ອງຂອງປັດໄຈຂະຫນາດ | 0.5 |
| % |
| ປັດໄຈຂະໜາດບໍ່ເປັນເສັ້ນຊື່ | 0.1 |
| %FS | |
| ຍ່າງແບບສຸ່ມຄວາມໄວ |
| 0.029 |
| m/s/√hr |
| ຄວາມຫນາແຫນ້ນຂອງສິ່ງລົບກວນ |
| 0.025 |
| mg/√Hz |
| ຄວາມລະອຽດ |
| 1.221×10−8 |
| g/LSB |
| ແບນວິດ |
| 200 |
| Hz |
| ຕົວກໍານົດການແມ່ເຫຼັກ (ທາງເລືອກ) | ||||
| ພາລາມິເຕີ | ເງື່ອນໄຂການທົດສອບ |
ຄ່າປົກກະຕິ | ຄ່າສູງສຸດ |
ໜ່ວຍ |
| ໄລຍະການວັດແທກແບບໄດນາມິກ |
| 2.5 |
| ໂກສ |
| ສູນຊົດເຊີຍ | ສະພາບແວດລ້ອມທີ່ບໍ່ແມ່ນແມ່ເຫຼັກ | 15 |
| ມໂກສ |
| ຄວາມຖືກຕ້ອງຂອງຫົວຂໍ້ | ||||
| ຄວາມຖືກຕ້ອງຂອງຫົວຂໍ້ແມ່ເຫຼັກ |
| 0.5 |
| ° |
| ຄວາມຖືກຕ້ອງຂອງທັດສະນະຄະຕິແນວນອນ | ||||
|
ຄວາມຖືກຕ້ອງຂອງມຸມສຽງ |
| 0.1 |
| ° |
| ຄວາມຖືກຕ້ອງຂອງມຸມມ້ວນ |
| 0.1 |
| ° |


