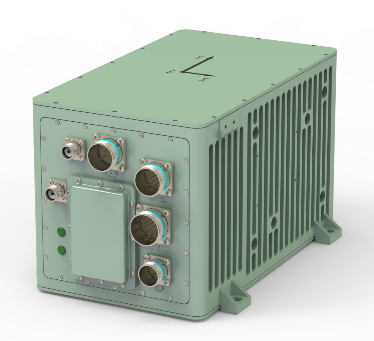
ປະເພດ 50 LASER Strapdown Inertial Navigation System




ລາຍລະອຽດຜະລິດຕະພັນ
Model 50 Inertial Navigation System ເປັນການແກ້ໄຂການນໍາທາງທີ່ທັນສະໄໝ.ມັນປະສົມປະສານເຄື່ອງວັດແທກຄວາມໄວຮອບວຽນແບບຢືດຢຸ່ນແບບ Quartz ປະເພດ 50 Ring Laser Gyroscope.ລະບົບນີ້ສາມາດປະສົມປະສານກັບ GNSS, altimeters, ແລະເຄື່ອງວັດແທກຄວາມໄວທາງອາກາດເພື່ອໃຫ້ຂໍ້ມູນການນໍາທາງທີ່ຖືກຕ້ອງເຊັ່ນ: ຄວາມໄວ, ຕໍາແຫນ່ງ, ແລະທັດສະນະຄະຕິສໍາລັບຜູ້ຂົນສົ່ງທາງອາກາດແລະຫນ້າດິນ.ມັນເຫມາະສົມສໍາລັບການນໍາໃຊ້ຕ່າງໆລວມທັງລົດຖັງ, ລົດຫຸ້ມເກາະ, ເຮືອບິນ, drones, ເຮືອ, ແລະອື່ນໆ.ລະບົບບັນລຸຄວາມຖືກຕ້ອງສູງທີ່ມີຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງຫນ້ອຍກວ່າ 5 ແມັດເມື່ອປະສົມປະສານກັບ GNSS.ມັນມີເວລາການສອດຄ່ອງຂອງພາຍໃຕ້ການ 10 ນາທີແລະດໍາເນີນການຕໍ່ເນື່ອງຫຼາຍກວ່າ 10 ຊົ່ວໂມງ.ລະບົບມີການໂຕ້ຕອບຫຼາຍອັນ ແລະສາມາດທົນຕໍ່ສະພາບແວດລ້ອມທີ່ທ້າທາຍໄດ້.ກະທັດຮັດແລະນ້ໍາຫນັກເບົາ, ມັນເປັນການແກ້ໄຂທີ່ເຊື່ອຖືໄດ້ແລະ versatile ສໍາລັບຄວາມຕ້ອງການນໍາທາງ.
Pຄຸນນະສົມບັດ RODICT
l ເຄື່ອງວັດແທກຄວາມໄວ quartz ແລະ laser gyro ວົງແຫວນທີ່ຄຸ້ມຄ່າ
l ທາງເລືອກ static ຫຼືການເຄື່ອນຍ້າຍຖານຕົນເອງສອດຄ່ອງ
l ການປັບຕົວກໍານົດຄວາມຜິດພາດແລະການຊົດເຊີຍໃນຂອບເຂດອຸນຫະພູມເຕັມ
l ທາງເລືອກໃນການປ້ອນຂໍ້ມູນທີ່ມີຄວາມຫຼາກຫຼາຍສໍາລັບ GNSS/Odometer/DVL
l ຮູບແບບການນໍາທາງທີ່ກໍານົດໄດ້
l ຄວາມເຫມາະສົມດ້ານສິ່ງແວດລ້ອມທີ່ດີເລີດ
l ມາດຕະຖານການທະຫານ
Aພື້ນທີ່ສະໝັກ
l ການນໍາທາງພາຫະນະທາງທະເລ
l ການນໍາທາງຍານພາຫະນະໃຕ້ນ້ໍາແລະການວາງຕໍາແຫນ່ງ
l ການຈັດຕໍາແຫນ່ງແລະທາງທິດເຫນືອ - ຊອກຫາຍານພາຫະນະທາງບົກ
l ສະຖຽນລະພາບແລະການຄວບຄຸມສໍາລັບການເຄື່ອນຍ້າຍຜູ້ໃຫ້ບໍລິການ
l ການວັດແທກທັດສະນະຄະຕິສໍາລັບຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການ
Mຟັງຊັ່ນ AIN
l ມັນມີຫນ້າທີ່ຂອງການອອກຂໍ້ມູນເຊັ່ນ: ຕໍາແຫນ່ງບັນທຸກ, ຫົວຂໍ້, ມຸມທັດສະນະຄະ, ອັດຕາມຸມແລະຄວາມໄວໃນເວລາທີ່ແທ້ຈິງ;
l ມັນມີຮູບແບບການເຮັດວຽກເຊັ່ນການນໍາທາງ inertial ອັນບໍລິສຸດແລະ INS / GNSS (ລວມທັງ Beidou) ນໍາທິດລວມ;
l ມີຫນ້າທີ່ຮັບຂໍ້ມູນການນໍາທາງດາວທຽມທີ່ສະຫນອງໂດຍອຸປະກອນມາດຕະຖານຄວາມຖີ່ຂອງລະບົບເວລາພາຍນອກ;
l ມັນມີຫນ້າທີ່ຂອງການຈັດຕັ້ງຂອງຕົນເອງພື້ນດິນແລະສະຫນັບສະຫນູນການທໍາງານຂອງການຈັດຕັ້ງທາງອາກາດ;
l ມັນມີຫນ້າທີ່ເຊັ່ນ: ການທົດສອບພະລັງງານດ້ວຍຕົນເອງ, ການທົດສອບຕົນເອງແຕ່ລະໄລຍະ, ບົດລາຍງານສະຖານະການ, ການຊົດເຊີຍຄວາມຜິດພາດໃນການຕິດຕັ້ງແລະການເກັບຮັກສາທີ່ບໍ່ປ່ຽນແປງ.
Pຕົວຊີ້ບອກປະສິດທິພາບ
| ຄວາມຖືກຕ້ອງຂອງລະບົບ ຄວາມຖືກຕ້ອງຂອງລະບົບ | Pure Inertial Navigation/Pure Inertial Navigation | 0.8 nmile/1ຊມ, CEP | |
| ການນໍາທາງ / ການນໍາທາງປະສົມປະສານກັບ GNSS | ≤5m , 1σ _ | ||
| ມຸມຫົວ/ຫົວ | 0.05°, RMS | ||
| ທັດສະນະຄະຕິແນວນອນ (ມ້ວນ ແລະສຽງ) ທັດສະນະຄະຕິແນວນອນ (ມ້ວນ ແລະສຽງ) | 0.01°, RMS | ||
| ຄວາມໄວ inertial ບໍລິສຸດ | 1 .5 m/s , RMS | ||
| ຄວາມໄວການນໍາທາງແບບປະສົມປະສານ GNSS | 0. 1 m/s , RMS | ||
| ຕົວຊີ້ວັດຂອງ ອຸປະກອນ inertial Gyro ແລະ Accelerometer Parameters | laser gyroscope _ Gyroscope | ຊ່ວງ/ໄລຍະ | ± 6 00 deg/s |
| ສະຖຽນລະພາບຄວາມອະຄະຕິ | ≤0.01 deg/h, 1σ | ||
| ການເຮັດຊ້ຳຄວາມລຳອຽງສູນ ຄວາມລຳອຽງເຮັດຊ້ຳ | ≤0.01 deg/h, 1σ | ||
| ປັດໄຈຂະຫນາດທີ່ບໍ່ແມ່ນເສັ້ນ | 10 ppm | ||
| ເຄື່ອງວັດແທກຄວາມເລັ່ງ ເຄື່ອງວັດແທກຄວາມເລັ່ງ | ຊ່ວງ/ໄລຍະ | ± 15g _ | |
| ສະຖຽນລະພາບຄວາມອະຄະຕິ | ≤10μg , 1σ | ||
| ການເຮັດຊ້ຳຄວາມລຳອຽງສູນ ຄວາມລຳອຽງເຮັດຊ້ຳ | ≤10μg , 1σ | ||
| ປັດໄຈຂະຫນາດທີ່ບໍ່ແມ່ນເສັ້ນ | 15 ppm | ||
| ການຈັດເວລາ ເວລາຈັດຮຽງ | ເລີ່ມເຢັນ | ≤ 8 ນທ | |
| ເລີ່ມຕົ້ນໃຫມ່ | ≤ 5 ນາທີ _ | ||
| ການເລີ່ມຕົ້ນທາງອາກາດ/ໃນການບິນ | ≤10ນາທີ | ||
| ຊົ່ວໂມງເຮັດວຽກ ເວລາປະຕິບັດງານ | ເວລາເຮັດວຽກຢ່າງຕໍ່ເນື່ອງ / ເວລາປະຕິບັດງານ | ຫຼາຍກວ່າ 10 ຊົ່ວໂມງ | |
| ຄຸນນະສົມບັດການໂຕ້ຕອບ ການໂຕ້ຕອບ | ການສະຫນອງແຮງດັນ / ແຮງດັນ | 18 ~ 36VDC | |
| ການນໍາໃຊ້ພະລັງງານ | ≤ 40W @ 24VDC | ||
| ການໂຕ້ຕອບໄຟຟ້າ / ໄຟຟ້າ | RS232 × 2 RS422 × 3 CAN × 2 ອີເທີເນັດ × 1 1pps × 1 | ||
| ອັດຕາການອັບເດດຂໍ້ມູນ (ກຳນົດຄ່າໄດ້) | 200Hz@115.2kbps _ _ _ | ||
| ໃຊ້ສະພາບແວດລ້ອມ ສິ່ງແວດລ້ອມ | ອຸນຫະພູມປະຕິບັດການ | -40°C ~ +65°C | |
| ອຸນຫະພູມການເກັບຮັກສາ / ອຸນຫະພູມການເກັບຮັກສາ | -55°C ~ +85°C | ||
| ໃຊ້ Altitude/Altitude | 20000ມ | ||
| ຄວາມຊຸ່ມຊື່ນ | 95% (+25°C) | ||
| ການສັ່ນສະເທືອນ / ການສັ່ນສະເທືອນ | 5g @ 20~2000Hz | ||
| ຊ໊ອກ/ຊ໊ອກ | 40 g, 11 ms, 1/2 Sine | ||
| ຄຸນສົມບັດທາງກາຍະພາບ ທາງດ້ານຮ່າງກາຍ | ຂະໜາດ/ຂະໜາດ (L*W*H) | 240 x202x 169 ມມ _ | |
| ນ້ຳໜັກ/ນ້ຳໜັກ | 9 ກິໂລ | ||
ຫມາຍເຫດ: ໂຄງສ້າງສາມາດປັບແຕ່ງໄດ້ຕາມຄວາມຕ້ອງການຂອງຜູ້ໃຊ້.